Project: Vision based obstacle representation for cobot collision avoidance in unstructured environments
Description
In industrial context, there is an increasing request to share the workspace between humans and robots. In this shared workspace, close collaboration between robots and humans takes place, such as robots helping humans with repetitive tasks. Collaboration can be made more flexible by enabling a robot to avoid collisions with both humans as well as other obstacles that are placed in the robot workspace (where the obstacles cannot be known in advance, while the robot is performing its task). This research aims at giving robots a perception of the environment that can be used for collision avoidance for dynamic obstacles that enter the robot workspace.
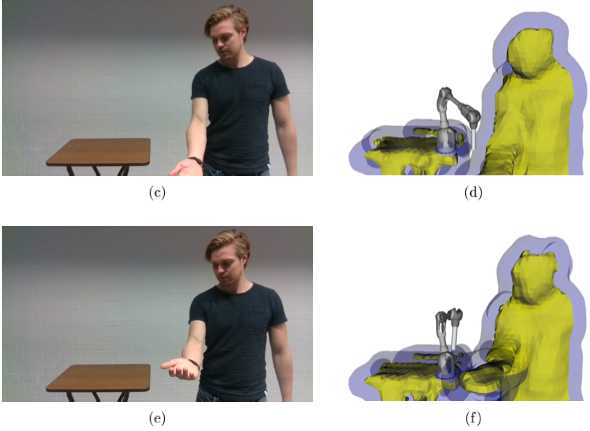
This research proposes a method that can transform point clouds coming from a depth camera into a representation of the environment that can be used for collision avoidance. The point clouds are interpolated using Radial Basis Functions (RBFs) to obtain an implicit function that represents the surface of the environment to be avoided. The surface of the environment is visualized using Marching Cubes (MC). The implicit function that is obtained from the RBFs can be combined with the potential field method for robot motion planning, such that a repelling force (coming from the obstacles in the environment) that acts on the robot is obtained. We provide an implementation of the RBF based online surface reconstruction such that the environment representation can be up- dated at 10 Hz. The robot itself can be excluded from the reconstructed environment representation to make sure the robot will not repel itself.
The proposed method is validated by reconstructing a workspace from online depth camera input. The reconstruction with point clouds coming directly from the camera is updated at 10 Hz on average. Collision avoidance is executed between a simulated robot and a person, by virtually placing a robot in the workspace observed by a depth camera. The simulated robot does avoid obstacles and moving persons. Collision avoidance with a real robot is performed as well, where the robot does avoid obstacles and persons.
Details
- Student
-
TBTeun Bosch
- Supervisor
-
 Andrei Jalba
Andrei Jalba
- Secondary supervisor
-
HSHenk Nijmeijer, Alessandro Saccon
- External location
- VinciTech
- Link
- Thesis