back to list
Project: Robust multi-hypothesis 6D pose estimation
Description
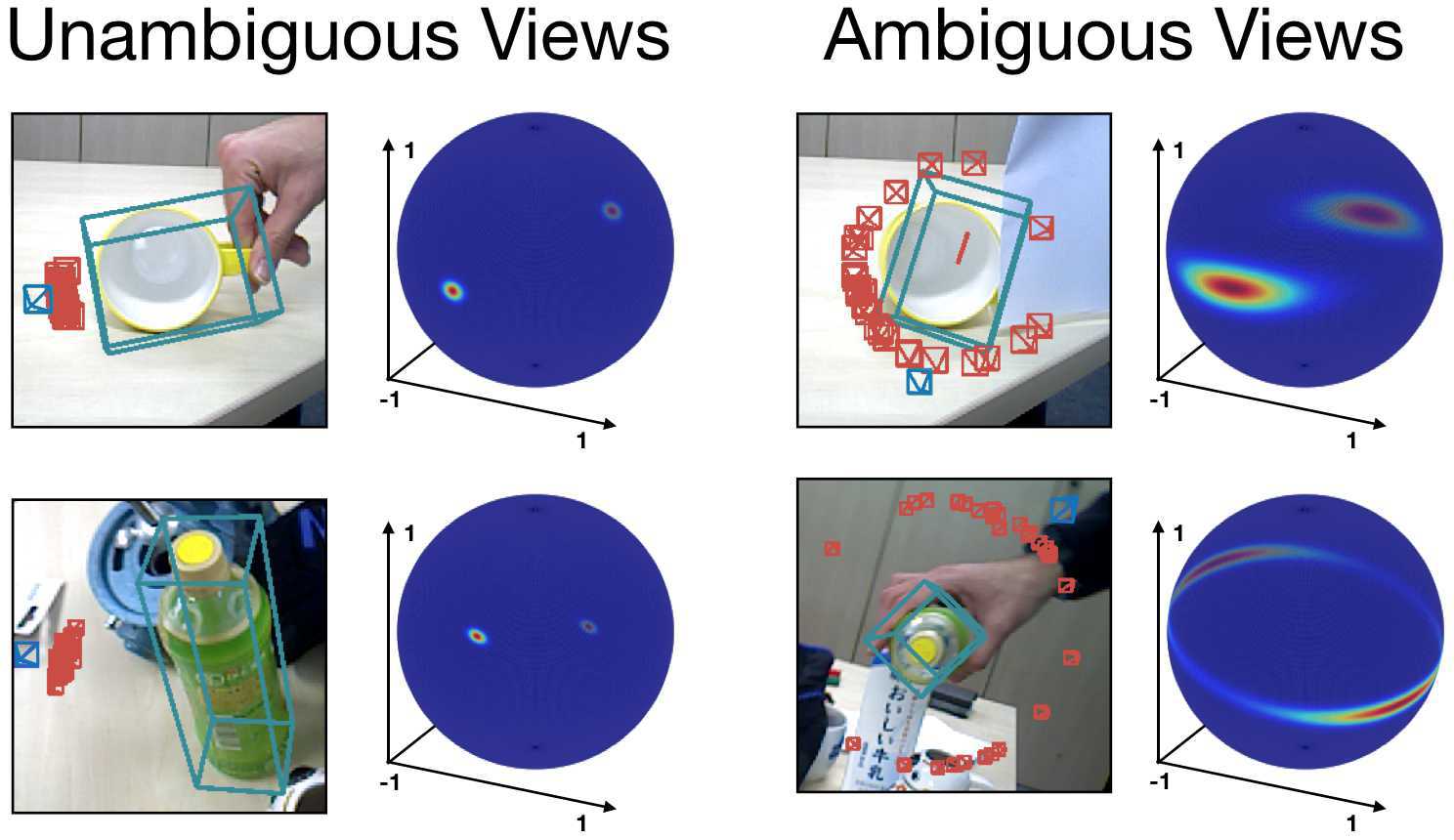
Pose estimation is a core component in many modern computer vision pipelines. In applications like robotic grasping, augmented reality, and scene understanding, the ability to accurately and robustly predict the position and orientation of objects from RGB images is essential. Though the performance of recent works on standard data sets has been impressive, there are still a number of key challenges to overcome. One such challenge, which has seen an increased amount of attention in recent years, is the influence of ambiguity. More specifically, some objects may appear visually identical from different viewpoints, causing images to map to poses in a one-to-many fashion. This phenomenon mainly occurs as a consequence of symmetries that can be present in the observed object, or be induced by self occlusion or occlusions caused by the environment.
In this project, we aim at designing novel technique for pose estimation that not only functions when faced with symmetry-induced ambiguity, but also outputs a meaningful representation of the range of ambiguous poses.
References
Figure taken from Manhardt, F., Arroyo, D. M., Rupprecht, C., Busam, B., Birdal, T., Navab, N., & Tombari, F. (2019). Explaining the ambiguity of object detection and 6d pose from visual data. In Proceedings of the IEEE/CVF International Conference on Computer Vision (pp. 6841-6850).
Details
- Student
-
TBTijn Bertens
- Supervisor
-
 Andrei Jalba
Andrei Jalba
- Secondary supervisor
-
ASAlessandro Saccon (Mechanical Engineering)
- Link
- Thesis